Approach
Method Overview
BOWConnect spawns N/2 forward workers and N/2 backward workers, each maintaining its own search tree and BOW instance. Each worker grows its MotionTree using constrained Bayesian Optimization — sampling controls, simulating dynamics via 4th-order Runge-Kutta, and learning separate GP models for reward and constraint.
When a potential connection between trees is detected via spatial hashing, multi-stage verification checks kinematic feasibility before solving a boundary value problem to generate the connecting trajectory.
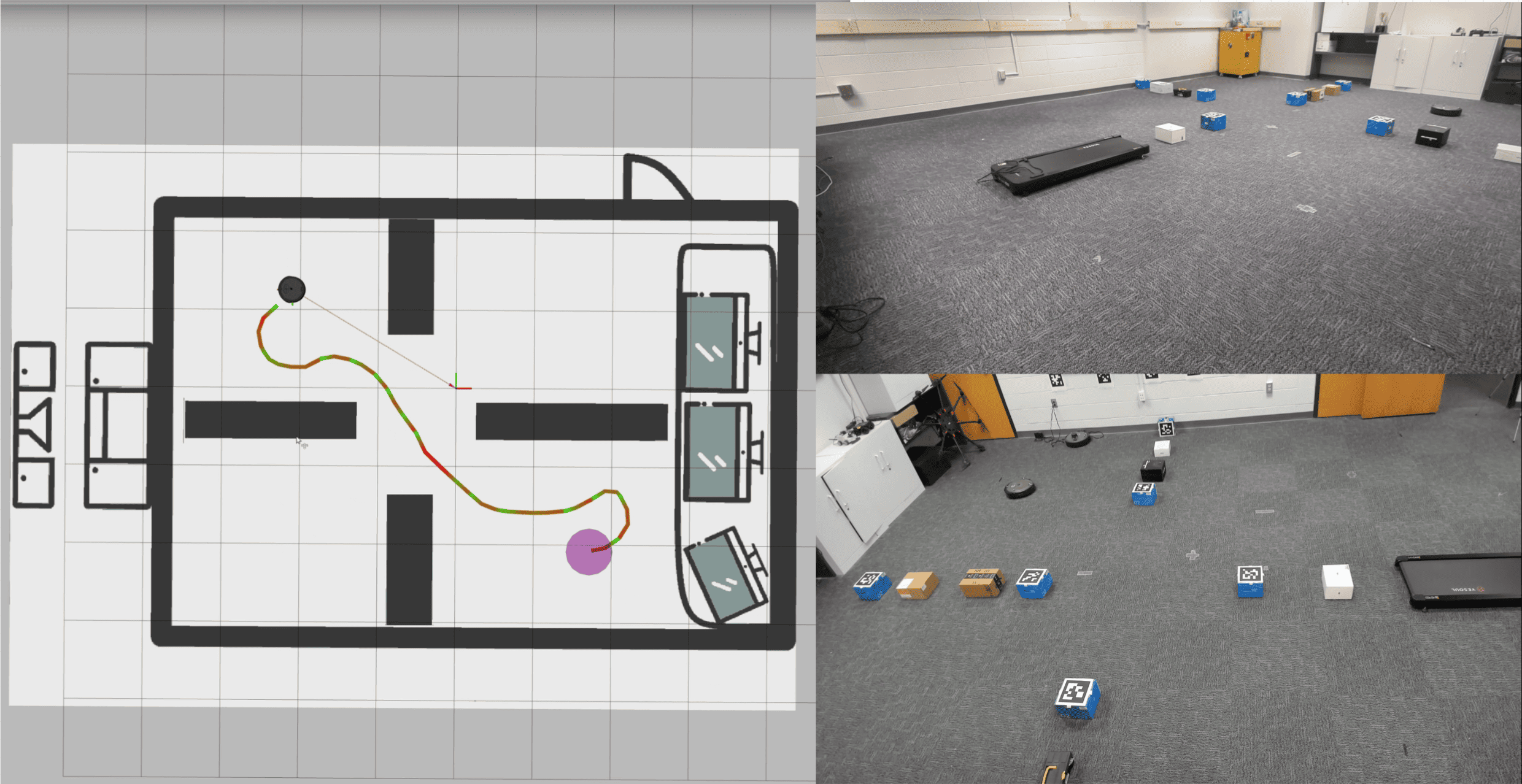
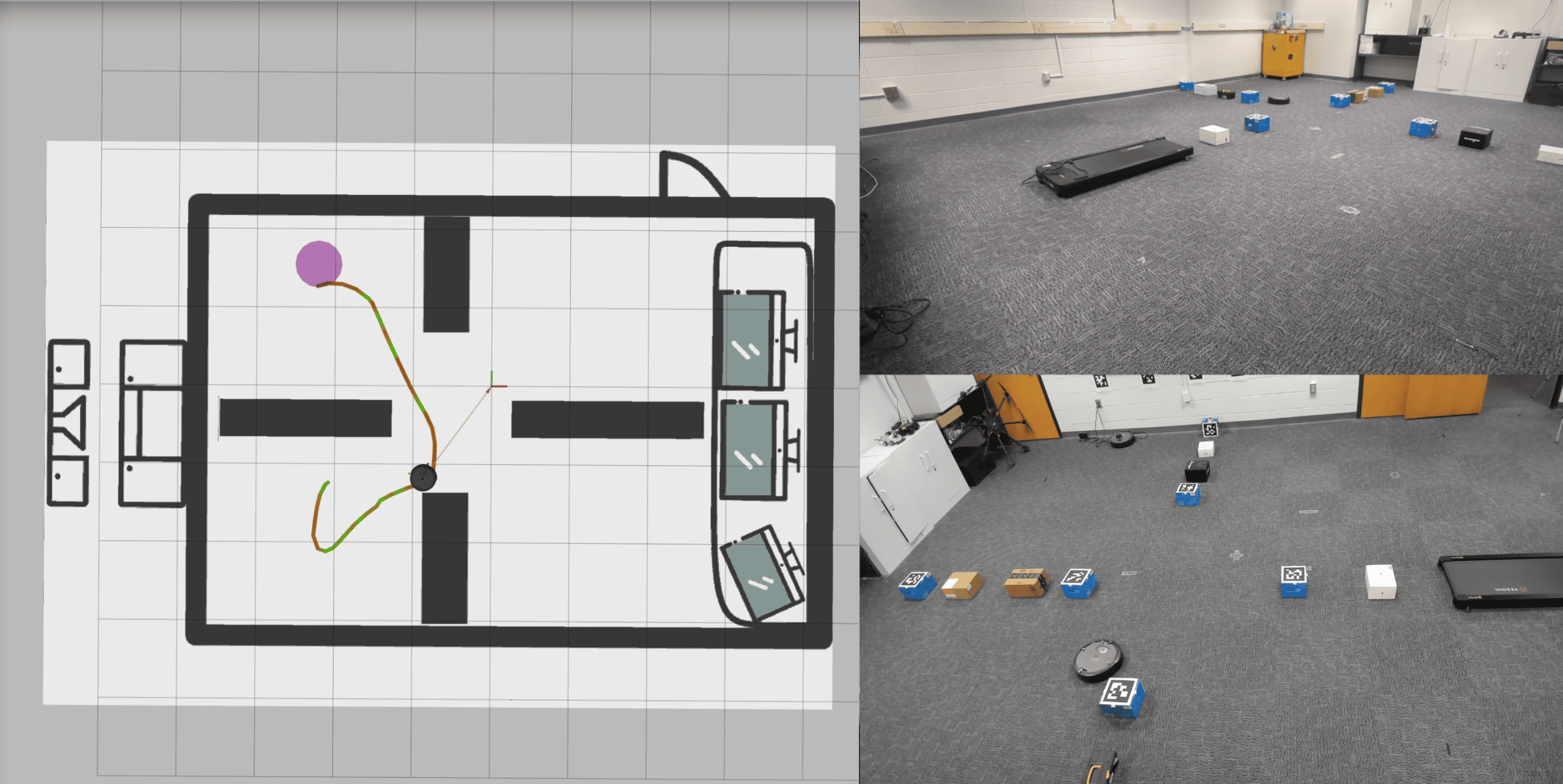
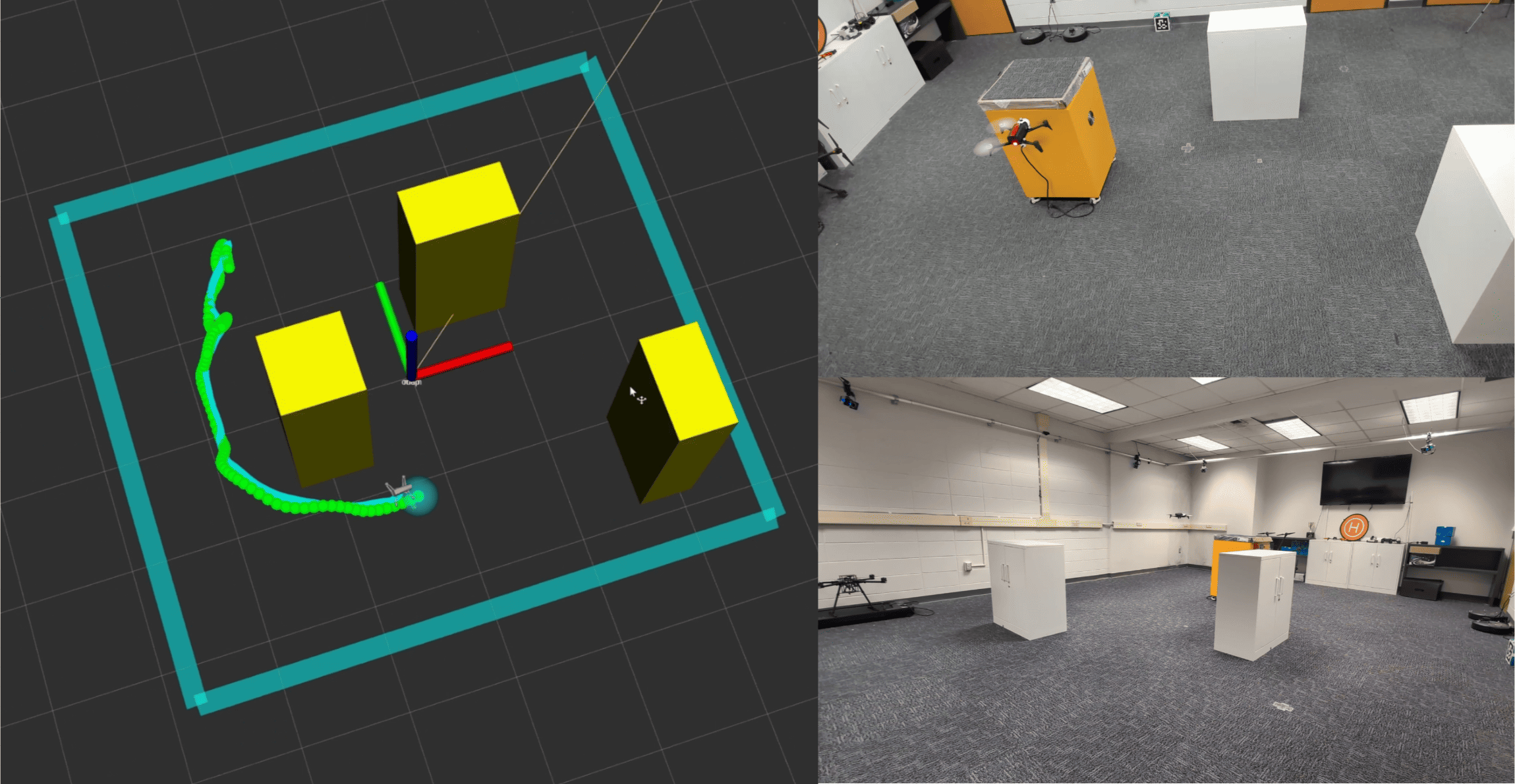
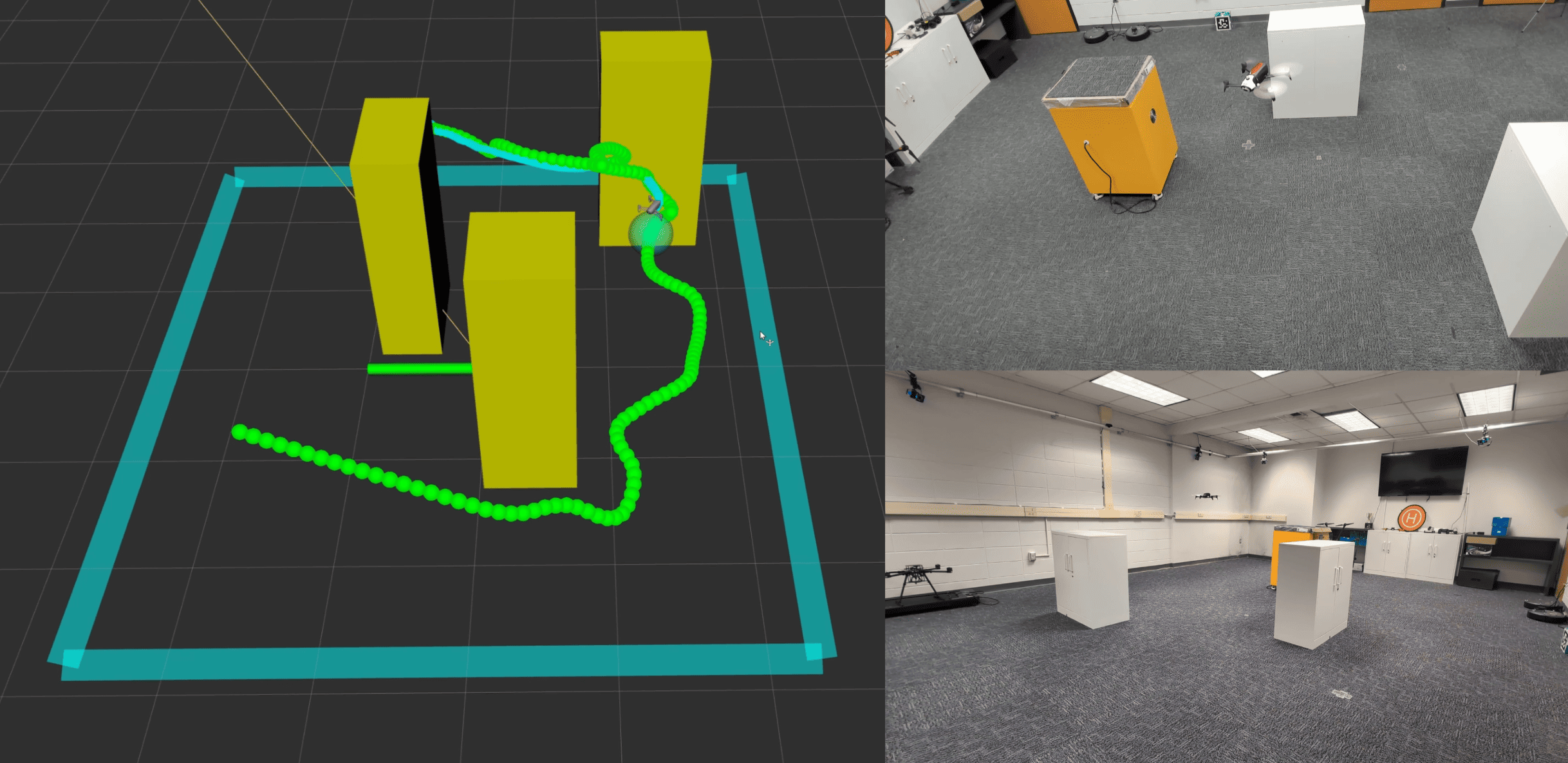
Figure 1. Parallel motion tree growth in a cluttered planar environment. Trees grow from start (green) and goal (red) regions. Grey trajectories show sampled short-horizon paths; bold blue curve is the final connected path. Cyan highlights the BVP connection.
System Architecture
Start Region
Sample states S
→
Forward Workers
BOW + MotionTree
⇔
Spatial Hash
Connection detection
⇔
Backward Workers
BOW + MotionTree
→
Goal Region
Sample states G
↓
BVP Solver
Bridge trajectory
↓
Merged Trajectory
Feasible path
Key Formulations
r(u) = −‖p(T) − ptarget‖ if collision-free, −∞ otherwise(6)
c(u) = 1 − 𝕀collision(τ(u))(7)
α(u) = [μr(u) − κσr(u)] × Pfeas(u)(8)